|
Harin Park I am currently an AI researcher at HD KSOE*, South Korea. I received my master’s degree in 3D Vision & Robotics Lab at UNIST, advised by prof. Kyungdon Joo. *HD KSOE (HD KOREA SHIPBUILDING & OFFSHORE ENGINEERING CO., LTD) I am interested in 3D vision, Computer vision, and Robotics. In particular, I am currently focusing on the AI perception tasks for robot navigation and autonomous driving, such as depth estimation. Contact : harinp3399[at]gmail[dot]com |

|
Publications |
|
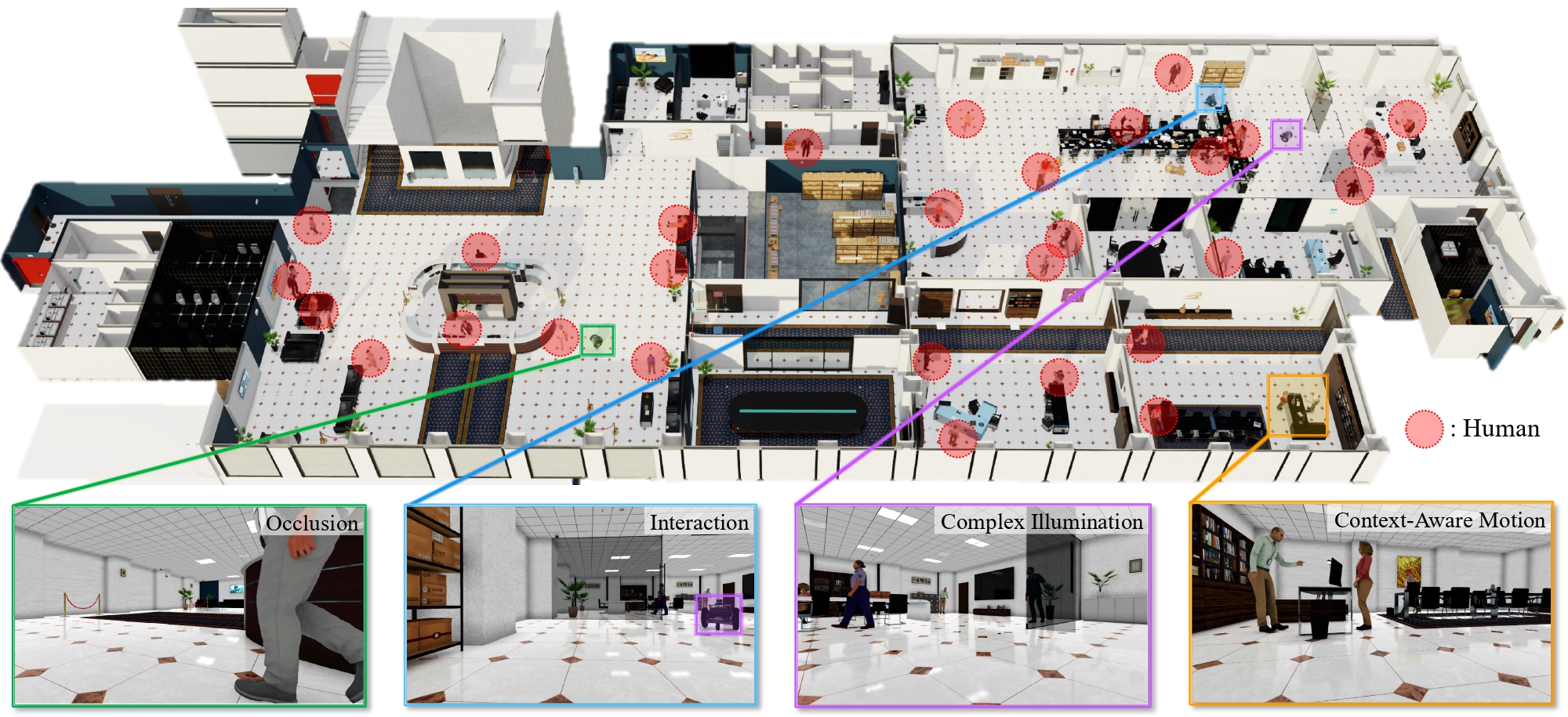
A Benchmark Dataset for Collaborative SLAM in Service Environments
Harin Park, Inha Lee, Minje Kim, Hyungyu Park, Kyungdon Joo RA-L, 2024 [ Project page | Paper ]
|
|
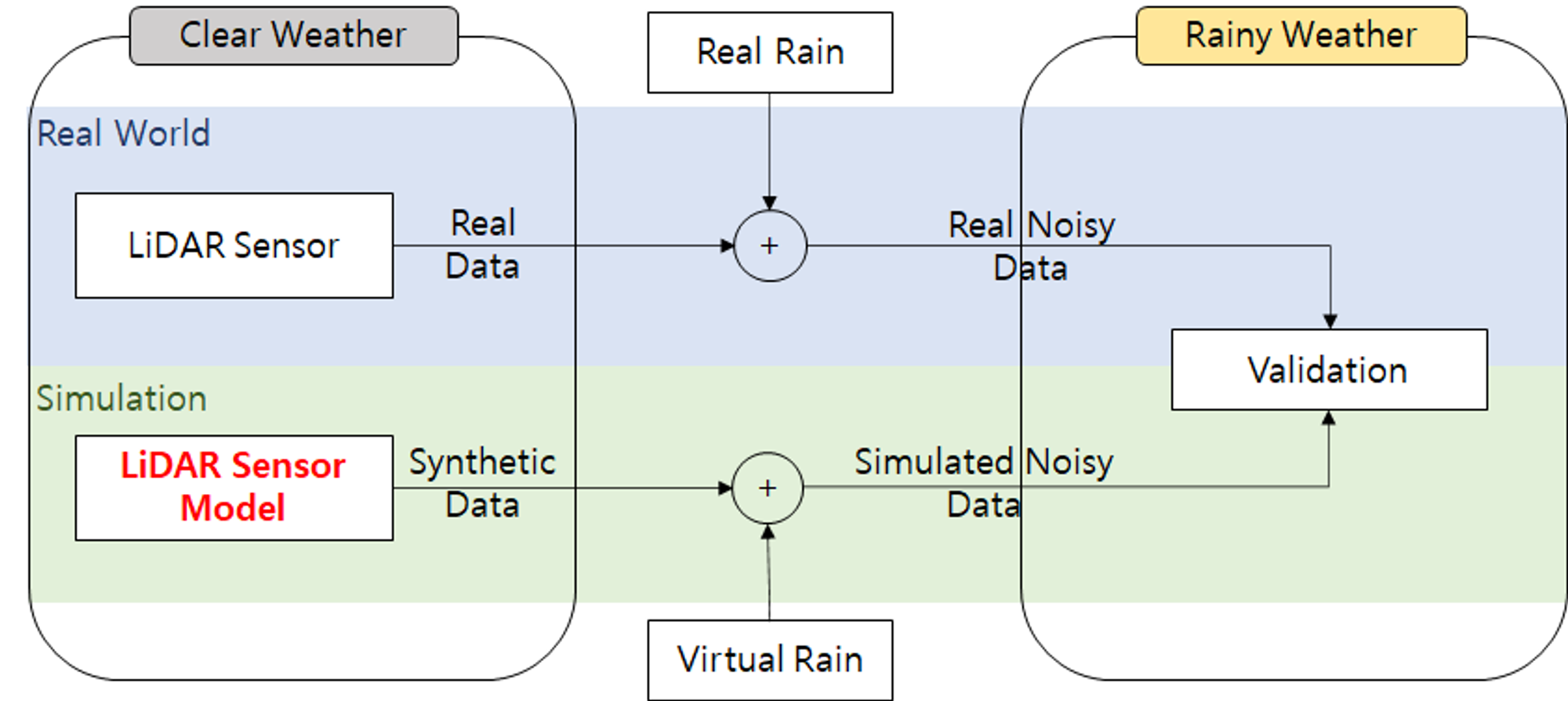
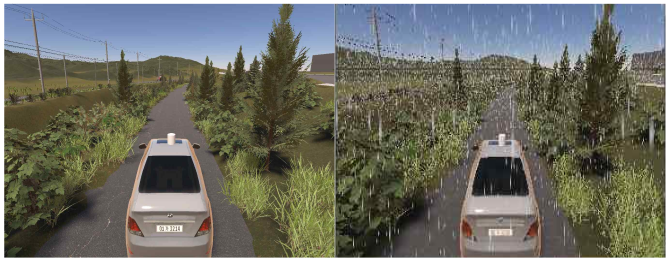
Modeling and Simulation of Rainfall Effect of Autonomous Driving LiDAR Sensor.
Taeyeon Park, Jangwoo Cheon, Impyeong Lee GISUP, 2021
|
|
Simulation of LiDAR Sensor considering Rainfall Effect (강우 효과를 고려한 라이다 센서 시뮬레이션)
Taeyeon Park, Gyuseok Lee, Jangwoo Cheon, Impyeong Lee KICS, 2021 [ Paper ]
|
|
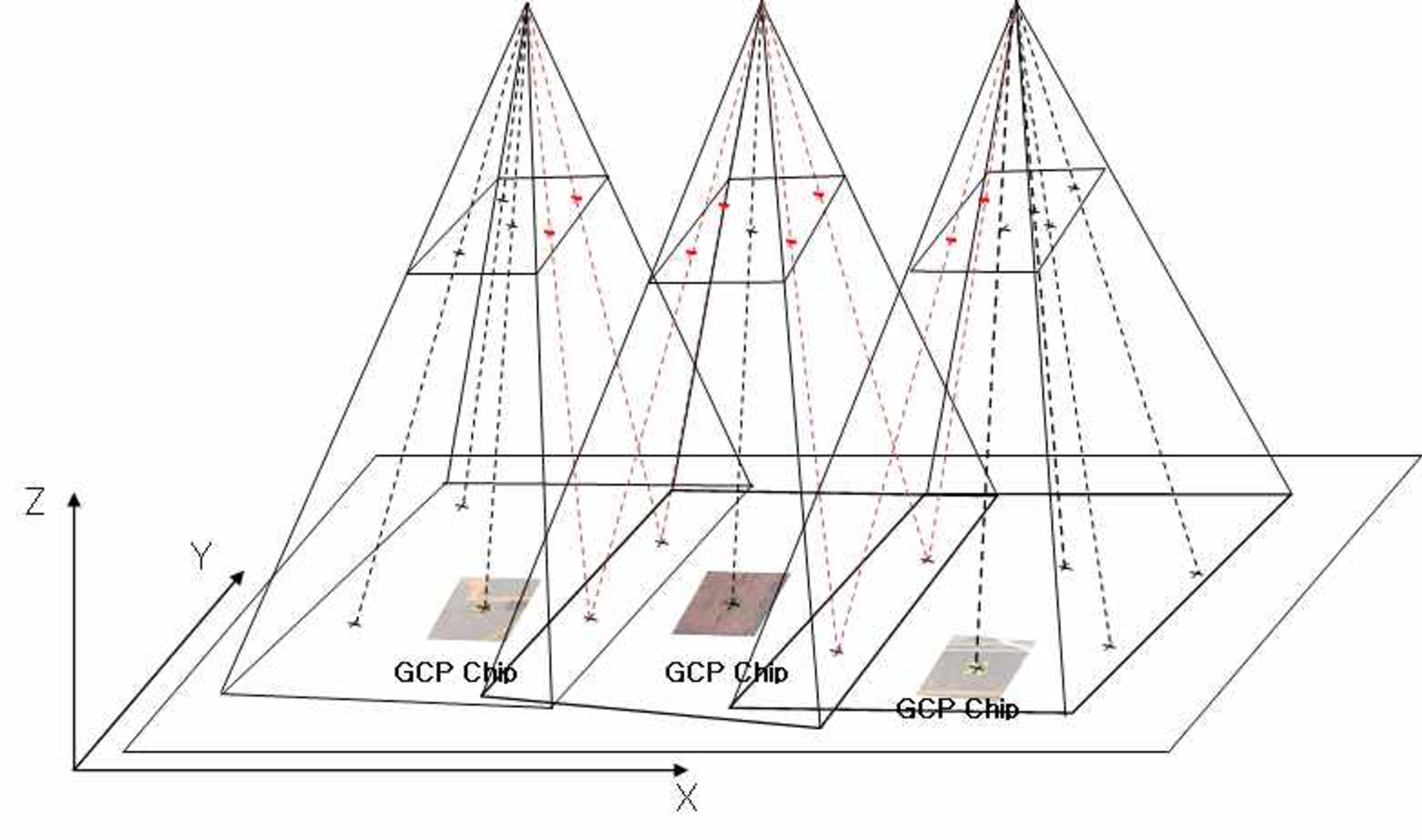
Evaluation for the validity of introducing GCP Chips in Aerial Triangulation.
Jangwoo Cheon, Taeyeon Park, Impyeong Lee ISRS, 2021
|
Projects |
|
Depth estimation based on omnidirectional cameras
On-going project, (2023.9 ~ Present)
|
|
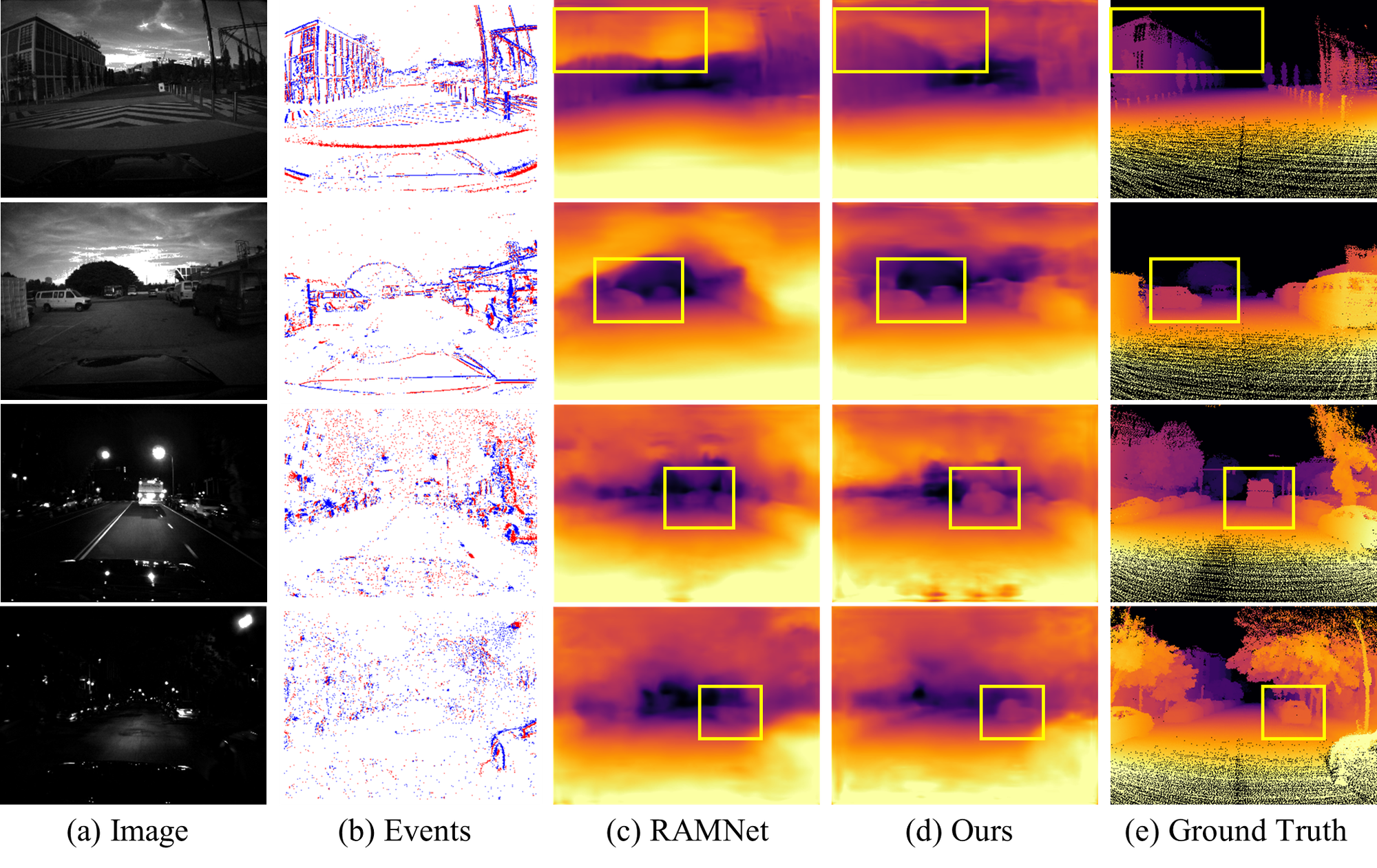
Depth estimation combining events and images
Graduate project, (2023.9 ~ 2024.6)
|

|
Collaborative SLAM (C-SLAM) benchmark dataset
Funded by the IITP, (2022.9 ~ 2024.12)
|
|
|
Automation of Aerial Triangulation using ground control point (GCP) chips.
(2021.5 ~ 2021.5)
|
|
|
Simulation of LiDAR Sensor considering rainfall effect
(2021.3 ~ 2022.2)
|
Awards & Honors |
Teaching |
Education |
|
Template from this website. |